
İlk askeri uyduların yörüngeye atılmasıyla beraber, bu teknolojinin sadece düşmanı gözetlemekle kısıtlı kalmaması gerektiği de ABD ordusu kurmaylarının aklına girdi. Bir dizi uydu kullanılarak tüm dost askeri birimlerin dünya üzerindeki yerlerini bulmaları, hatta hedeflerine doğru rotayı saptalamaları mümkün olabilirdi.
Takip eden yıllarda, başını ABD Hava Kuvvetleri'nin çektiği çalışmalar sonucu, bu iş için gereken teknolojinin geliştirilmesi mümkün oldu. Şüphesiz bu proje askeri kullanıma yönelikti ve eğer büyük bir facia olmasaydı, öyle de kalacaktı. Ama ABD başkanı Reagan'ın yönetimde olduğu 80'li yıllarda, bir yolcu uçağı rotasından sapıp Sovyet avcıları tarafından düşürülünce, durum değişti.
Reagan bir açıklama yaparak, bu sistemin varlığını doğruladı ve devreye girdiği zaman sivil kullanıma da açılacağını bildirdi. Tabii ordunun da onayını alarak! Nitekim sistem 1993 yılından itibaren, belirli kısıtlamalarla da olsa sivil kullanıma açıldı.
Uydular ve sinyaller nasıl çalışıyor?
GPS sisteminin ana amacı, dünyanın etrafına orta yükseklikte yörüngeye oturtulmuş 30 uydudan oluşan bir ağ yardımıyla, yeryüzündeki herhangi bir noktanın harita üzerindeki konumlandırmasını yapabilmektir. Burada yaklaşık 15 metrelik bir yanılma payı olabilmektedir.
Sistem sivil kullanıma açıldığında, bu yanılma payı sivil kullanıcılar için bilinçli olarak 100 metre civarında olacak biçimde ayarlanıyordu. Ancak geçen zamanla birlikte bunun lüzumsuz olduğuna karar verildi ve bu kısıtlama kaldırıldı.
Bu uydu ağındaki uydular dünyanın etrafına düzenli aralıklarla yerleştirilmiştir. Yeryüzündeki herhangi bir kullanıcı, uygun koşullarda aynı anda 10 kadar uyduyu görebilir. Uydular konum bilgisi dâhil belirli parametrelerin yayınını yaparlar. Bu sinyalleri okuyan yer cihazları da uygun algoritmaları kullanarak yerlerini tespit ederler.
Sistemin düzgün çalışabilmesi için bir yer cihazının en az 4 uyduyu görebilmesi şarttır. Çoğu sivil GPS cihazı ise bu sinyallerle yetinmeyip, yerde bulunan baz istasyonlarının sinyallerini de hesaba katar.
Rota nasıl çiziliyor?
Modern GPS cihazları sadece kullanıcının dünya üzerindeki konumunu kesinlikle tespit etmekle yetinmezler. Üzerine bir de belirtilen herhangi bir hedefe giden rotayı en uygun biçimde belirlemekle yükümlüdürler. İlk bakışta pek basit gibi görünse de, aslında bu hayli karmaşık bir işlemdir.
Bir GPS cihazının uygun rotayı çizmek için pek çok farklı unsuru bilmeye ihtiyacı vardır. Bunlardan ilki, üzerinde seyahat edilen arazidir. Bu arazi dümdüz bir çöl ya da gayet karmaşık bir şehir olabilir. Burada önemli olan haritadaki nirengi noktalarıdır.
GPS cihazlarında kullanılan haritalar vektör bazlı şemalardır. Bu şemalar hazırlanırken, arazi şartlarına göre değişen nirengi noktaları belirlenir. Açık arazide jeolojik oluşumlar temel alınabilirken, şehir haritalarında bina bloklarının ve cadde uzunluklarının kullanılması söz konusudur. Ancak hesaplayan algoritma için her zaman bu noktalara yer verilmesi şarttır.
Yön ve sürat tespiti

Sivil GPS cihazları rota çizerken sadece uydu ve baz istasyonu sinyallerine değil, başka veri kaynaklarına da başvururlar. Mesela bir otomobile yerleştirilmiş olan GPS cihazı, aracın yönü, hızı, hızlanması ve yavaşlaması gibi verileri devamlı olarak araçtan alarak hesabına katar.
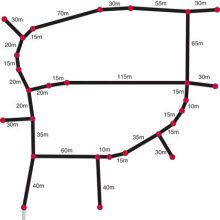
Peki rota neye göre hesaplanır? Burada iki farklı algoritmanın yaygın olarak kullanıldığını görürüz. İlki Dijkstra'nın Algoritması denilen sistemdir. Bu sistem vektörel harita üzerindeki nirengi noktalarının boyut değerlerini ele alır ve ortaya en düşük uzunluğa sahip değeri koymaya çalışır. Yani en kısa mesafeyi bulmayı amaçlar.
Bu algoritmanın en önemli eksiklerinden biri, rota çizerken gidilen yönün dikkate çok fazla alınmamasıdır. Kullanıcı doğuya seyahat etmek isterken, bu algoritma batıdaki nirengi noktalarını da aynı değerde hesaba katmayı deneyebilmektedir. Bu da sonucu değişken ve her zaman güvenilir olmaktan uzak kılabilir.
A* Algoritması

A* ya da A-Star olarak da bilinen ikinci algoritma, 1968 yılında Hart, Nilsson ve Raphael adında üç biliminsanı tarafından geliştirilmiştir. Bu algoritma temelinde buluşsal (heuristic) bir sistemdir ve nirengi noktaları arasındaki mesafeyi hesaba katmadan, yani "kuş uçuşu" tabir ettiğimiz anlamda rota çizer.
Bu yöntemde önce iki nokta arasındaki mesafe, en düşük sayıda nirengi noktası içerecek biçimde hesaplanır. Sonraki aşamada ise nirengi noktalarının mesafe değerleri, ulaşılabilirlikleri ve daha başka unsurlar da dikkate alınarak eleme yapılır.
Bu sistemin en zayıf noktası, vektörel haritadaki nirengi noktaları arasında bir bağ olmadığında ortaya çıkar. Normalde ulaşılabilir olan yerler, bu yüzden ulaşılamaz olarak algılanabilir ve rota çizilemeyebilir. Bunun en belirgin örneği feribot geçişi yapılması gereken noktalardır. GPS cihazı nehrin iki yakası arasında vektörel bağ kuramayacağından, kullanıcıya bir rota sunamayacaktır.
Genel Eksiklikler
Günümüzde kullanılan GPS cihazlarının en önemliği eksikliği, çevremizdeki dünyayı bizim gibi algılayamıyor olmalarından kaynaklanır. Trafik koşulları, çeşitli sebeplerle kapanan ya da açılan yollar, değişen hava ve çevre koşulları, feribot gibi alternatif ulaşım yöntemleri gibi konular söz konusu olduğunda, GPS cihazları tamamen kör sayılırlar.
Uydu ve yer istasyonu sinyallerini hesaplayarak yer bulma konusunda çok başarılı olmalarına karşın, çevreyi ve kullanıcı ihgtiyaçlarını dikkate almalarındaki körlükleri, GPS cihazlarının rota çizme konusunda son derece tutarsız ve güvenilmez olmasına sebep olmaktadır.
Bu durumu düzeltmek için çeşitli çalışmalar yapılmaktadır. Mesela cihazların kablosuz internet bağlantısı sayesinde yol ve hava durumunu takip edebilmelerini sağlamaya yönelik çalışmalar vardır. Öte yandan kullanıcının genel alışkanlıklarını ve ihtiyaçlarını algılamaya yönelik yapay zekanın geliştirilmesine de çalışılmaktadır. Ancak bunların olgunlaşması için biraz daha zaman gerektiği de çok açıktır.